کاربردهای یادگیریتقویتی (Applications of Reinforcement Learning)
یادگیری تقویتی در صنایع مختلف کاربردهای گستردهای دارد:
1.بازی(Gaming)
یادگیری تقویتی برای ایجاد عاملهایی استفاده شده است که بازیهایی مانند شطرنج، گو و بازیهای ویدیویی را در سطحی فراتر از انسان بازی میکنند. نمونههای برجسته شامل AlphaGo از DeepMind و ربات Dota 2 از OpenAI هستند.
2.رباتیک(Robotics)
یادگیری تقویتی برای آموزش رباتها به منظور انجام وظایفی مانند راه رفتن، گرفتن اشیا و پیمایش مستقل در محیطها استفاده میشود.
3.امورمالی (Finance)
یادگیری تقویتی در معاملات الگوریتمی، مدیریت سبد و ارزیابی ریسک به کار میرود، جایی که عامل یاد میگیرد تصمیمات مالی بهینهای اتخاذ کند.
مثال : تصور کنید یک ربات معاملهگر داریم که در بازار بورس فعالیت میکند. این ربات هر روز قیمت سهام را بررسی میکند و تصمیم میگیرد چه زمانی خرید یا فروش کند. با توجه به عملکردش، ربات یاد میگیرد که کدام سهام بیشتر سودآور است و چه زمانی باید از خرید یا فروش خودداری کند.
4.بهداشت و درمان (Healthcare)
یادگیری تقویتی برای برنامههای درمانی شخصیسازیشده، بهینهسازی دوز داروها و برنامهریزی خودکار جراحی استفاده میشود.
مثال : فرض کنید یک ربات پزشک داریم که باید دوز داروی بیماران را تعیین کند. این ربات با تجزیه و تحلیل دادههای بیماران و مشاهده اثرات داروها یاد میگیرد که چه دوزی برای هر بیمار بهترین نتیجه را دارد.
5.وسایل نقلیه خودگردان (Autonomous Vehicles)
یادگیری تقویتی در توسعه خودروهای خودران بسیار مهم است، جایی که عامل باید بر اساس دادههای حسگرها تصمیمات لحظهای بگیرد.
خودرو با تجربه در رانندگی، یاد میگیرد که چگونه در شرایط مختلف رانندگی کند و از تصادفات جلوگیری نماید.
مثال : تصور کنید یک خودرو خودران داریم که باید در خیابانها حرکت کند. این خودرو با استفاده از حسگرها و دوربینها، محیط اطرافش را شناسایی میکند. اگر خودرو به یک مانع نزدیک شود، یاد میگیرد که چگونه سرعتش را کم کند یا به سمت دیگر برود تا از تصادف جلوگیری کند.
6.پردازش زبان طبیعی (Natural Language Processing)
یادگیری تقویتی برای آموزش عاملهای گفتگو، بهینهسازی خلاصهسازی متون و بهبود ترجمه ماشینی به کار میرود.
مثال : فرض کنید یک ربات گفتگو داریم که میخواهد با انسانها صحبت کند. این ربات با یادگیری از مکالمات گذشتهاش متوجه میشود که کدام سوالات بهتر جواب داده میشوند. مثلاً اگر ربات متوجه شود که وقتی از شخصی میپرسد “چه احساسی دارید؟”، پاسخهای بهتری دریافت میکند، در مکالمات آینده این سوال را بیشتر میپرسد.
تصویر1 – کاربردهای یادگیریتقویتی
چالشهای یادگیریتقویتی
علیرغم پتانسیل آن، یادگیری تقویتی با مجموعه ای از چالش های خاص خود روبرو است:
1.کارایی نمونه (Sample Efficiency)
الگوریتمهای یادگیری تقویتی معمولاً به تعداد زیادی تعامل با محیط نیاز دارند تا سیاستهای مؤثری بیاموزند، که این امر میتواند زمانبر و از نظر محاسباتی پرهزینه باشد
مثال : تصور کنید یک بچه میخواهد یاد بگیرد که چگونه دوچرخهسواری کند. اگر بچه هر بار که سعی میکند بیفتد و دوباره شروع کند، باید ساعتها تمرین کند تا یاد بگیرد. اما اگر معلمی به او نشان دهد که چگونه تعادلش را حفظ کند و از اشتباهاتش درس بگیرد، میتواند سریعتر یاد بگیرد.
ایجاد تعادل بین اکتشاف و بهرهبرداری یکی از چالشهای اصلی در یادگیری تقویتی است. کاوش بیش از حد میتواند منجر به یادگیری کندی شود، در حالی که بهرهبرداری بیش از حد ممکن است مانع از کشف استراتژیهای بهتر توسط عامل گردد.
به عبارتی عامل باید بین امتحان کردن گزینههای جدید (اکتشاف) و استفاده از بهترین گزینههای شناختهشده (بهرهبرداری) تعادل برقرار کند.
مثال : فرض کنید یک بچه میخواهد شیرینی بخورد. اگر او تنها از یک نوع شیرینی که همیشه میخورد، استفاده کند (بهرهبرداری)، ممکن است شیرینیهای خوشمزهتری را که امتحان نکرده از دست بدهد. اما اگر همیشه در حال امتحان شیرینیهای جدید باشد (اکتشاف)، ممکن است هیچکدام را بهخوبی یاد نگیرد و در نهایت گرسنه بماند.
3.پایداری و همگرایی (Stability and Convergence)
تعاریف مختلف
آموزش عوامل یادگیری تقویتی، بهویژه عوامل یادگیری تقویتی عمیق، میتواند ناپایدار باشد و همیشه به یک راهحل بهینه همگرا نشود.
در یادگیری تقویتی، اگر عامل نتواند به یک راهحل پایدار برسد و مرتباً در حال تغییر باشد، نمیتواند بیاموزد که چگونه بهترین تصمیمات را اتخاذ کند .
مثال : تصور کنید یک بچه میخواهد یک پازل را حل کند. اگر هر بار که یک قطعه را در جای نادرست قرار میدهد، به سمت گزینه دیگری برود، ممکن است هرگز به نتیجه نرسد. اما اگر بتواند به آرامی به حل پازل نزدیکتر شود، با هر بار تلاش به نتیجه مطلوب نزدیکتر خواهد شد.
4.طراحی پاداش (Reward Design)
در یادگیری تقویتی، اگر تابع پاداش بهدرستی طراحی نشود، عامل ممکن است به انجام کارهایی تشویق شود که واقعاً صحیح نیستند
مثال : فرض کنید یک کودک به خاطر انجام کارهای خوب (مانند تمیز کردن اتاقش) یک ستاره طلا میگیرد. اما اگر به او بگویید که میتواند یک شکلات هم بگیرد، ممکن است به سمت انجام کارهای نادرست برود تا شکلات بیشتری بهدست آورد. اگر پاداشها بهدرستی طراحی نشوند، ممکن است کودک رفتارهای بدی از خود نشان دهد.
5.پیادهسازی در دنیای واقعی (Real-World Deployment)
وقتی یادگیری تقویتی در دنیای واقعی به کار گرفته میشود، چالشهای بیشتری مانند ایمنی و قابلیت اطمینان باید مورد توجه قرار گیرند.
مثال : تصور کنید یک ربات برای کمک به سالمندان طراحی شده است. اگر این ربات در یک خانه واقعی کار کند، باید بتواند با انسانها تعامل کند و در شرایط مختلف تصمیمات درستی بگیرد. مثلاً اگر در یک محیط شلوغ قرار گیرد، باید به ایمنی خود و دیگران توجه کند.
ترتیبی که هوشینو برای خواندن مطالب یادگیری تقویتی به شما پیشنهاد میکند:
در یادگیری بانظارت، یک متخصص انسانی مجموعه دادهها را برچسبگذاری کرده است، به این معنی که پاسخهای صحیح ارائه شدهاند. به عنوان مثال، مجموعه دادهها میتواند شامل تصاویری از خودروهای مختلف باشد که متخصص هر خودرو را با نام سازنده آن برچسبگذاری کرده است.
دادهها به همراه پاسخهای صحیح به ماشین ارائه میشوند و ماشین یاد میگیرد که آنها را تکرار کند.
در یادگیری بانظارت، عامل یادگیرنده یک ناظر دارد که مانند معلم، پاسخهای صحیح را ارائه میدهد. از طریق آموزش با این مجموعه دادههای برچسبگذاری شده، عامل بازخورد دریافت میکند و میآموزد که چگونه دادههای جدید و ناشناخته (مانند تصاویر خودرو) را در آینده طبقهبندی کند.
در یادگیری تقویتی، دادهها بخشی از ورودی نیستند بلکه از طریق تعامل با محیط جمعآوری میشوند. بهجای اینکه سیستم را از پیش در مورد اینکه کدام اقدامات برای انجام یک وظیفه بهینه هستند مطلع کند، یادگیری تقویتی از پاداشها و جریمهها استفاده میکند. بنابراین، عامل پس از انجام هر عمل، بازخورد دریافت میکند.
یادگیری بدون نظارت در مقابل یادگیری تقویتی
یادگیری بدون نظارت با دادههای بدون برچسب سر و کار دارد و در اینجا بازخوردی وجود ندارد. هدف این است که مجموعه دادهها را کاوش کرده و شباهتها، تفاوتها یا خوشهها را در دادههای ورودی پیدا کنیم بدون اینکه از قبل اطلاعاتی درباره خروجی مورد انتظار داشته باشیم.
دادهها بدون پاسخهای صحیح به ماشین ارائه میشوند و ماشین باید بهطور مستقل الگوها را پیدا کند.
از سوی دیگر، یادگیری تقویتی شامل کاوش در محیط است، نه در مجموعه دادهها، و هدف نهایی متفاوت است: عامل تلاش میکند تا بهترین اقدام ممکن را در موقعیت معین انجام دهد تا پاداش کل را به حداکثر برساند. بدون مجموعه دادههای آموزشی، مشکل یادگیری تقویتی توسط اقدامات خود عامل و با ورودی از محیط حل میشود.
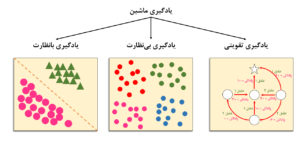
تصویر1 – تفاوت یادگیریهای ماشین
جدول زیر تفاوت بین یادگیری تحت نظارت، یادگیری بدون نظارت و یادگیری تقویتی را نشان می دهد :
یادگیری با نظارت
یادگیری بی نظارت
یادگیری تقویتی
دادههای ورودی
برچسبگذاری شده: «پاسخ صحیح» در آن گنجانده شده است.
برچسبگذاری نشده: «پاسخ صحیح» مشخص نشده است.
دادهها بخشی از ورودی نیستند، بلکه از طریق آزمون و خطا جمعآوری میشوند.
مسئلهای که باید حل شود.
برای انجام پیشبینی (مانند ارزش آینده یک سهام) یا طبقهبندی (مانند شناسایی درست ایمیلهای اسپم) استفاده میشود.
برای کشف و شناسایی الگوها، ساختارها یا روابط در مجموعه دادههای بزرگ استفاده میشود (مثلاً افرادی که محصول A را سفارش میدهند، محصول B را نیز سفارش میدهند)
برای حل مسائل مبتنی بر پاداش استفاده میشود (مثلاً یک بازی ویدئویی).
راه حل
ورودی را به خروجی متصل میکند.
تشابهات و تفاوتها در دادههای ورودی را پیدا کرده و آنها را به کلاسهای مختلف طبقهبندی میکند.
تعیین میکند که کدام وضعیتها و اقدامات بیشترین پاداش تجمعی کلی را برای عامل به حداکثر میرساند.
وظایف عمومی
طبقه بندی ، رگرسیون
خوشهبندی، کاهش ابعاد، یادگیری وابستگی
کشف و بهرهبرداری
مثال
تشخیص تصویر، پیشبینی بازار سهام
تقسیمبندی مشتریان، توصیه محصولات
بازیهای رایانهای، جاروبرقیهای رباتیک
نظارت
بلی
بلی
خیر
بازخورد
بله. مجموعه صحیح اقدامها ارائه شده است.
خیر
بله، از طریق پاداشها و تنبیهها (پاداشهای مثبت و منفی).
نحوه اجرای یادگیریتقویتی
پیادهسازی یادگیری تقویتی شامل چندین مرحله است؛ از تعریف محیط گرفته تا آموزش عامل و ارزیابی عملکرد آن.
1.تعریف محیط(Define the Environment)
اولین قدم در پیادهسازی یادگیری تقویتی، تعریف محیطی است که عامل در آن فعالیت خواهد کرد. این محیط باید شامل حالات، اقدامات، احتمالات انتقال و ساختار پاداش باشد.
مثال : فرض کنید یک محیط دو بعدی داریم که شامل یک اتاق است. در این اتاق، تعدادی سکه و موانع قرار داده شدهاند. ربات ما در این اتاق حرکت میکند و هدفش جمعآوری سکهها است. اتاق شامل حالات(States) است که موقعیتهای مختلف ربات در محیط را نشان میدهد (مثلاً ربات در مختصات [x,y]) اقدامات (Actions) شامل حرکات ربات به سمت بالا، پایین، چپ یا راست است. وقتی ربات به سکه برسد، پاداش (Reward) مثلاً ۱۰ امتیاز میگیرد و اگر به مانع برخورد کند، ۵- امتیاز دریافت میکند.
2.تعریف عامل(Define the Agent)
عامل همان ربات است که باید تصمیم بگیرد چه کاری انجام دهد. ما به او یک استراتژی میدهیم که در هر موقعیت مشخص کند چه تصمیمی بگیرد تا به هدفش (جمعآوری سکهها) برسد.
مثال : عامل در اینجا ربات است. ما باید برای ربات یک سیاست (Policy) تعریف کنیم؛ یعنی راهبردی که ربات را هدایت میکند تا بهترین اقدامات را در هر وضعیت انتخاب کند. برای مثال، سیاست میتواند این باشد که ربات همیشه سعی کند به سمتی برود که سکه بیشتری در آنجا وجود دارد. همچنین، تابع ارزش (Value Function) به ما کمک میکند تا ارزیابی کنیم هر وضعیت چقدر برای ربات ارزشمند است؛ بهعنوان مثال، اینکه ربات در نزدیکی یک سکه باشد چقدر مطلوب است.
3.مقداردهی اولیه به عامل (Initialize the Agent)
تعاریف مختلف
سیاست عامل و توابع ارزش را مقداردهی اولیه کنید. این معمولاً شامل تنظیم وزنهای اولیه برای یک شبکه عصبی یا مقداردهی اولیه Q-values برای الگوریتم Q-Learning است.
مانند زمانی که تازه میخواهیم به ربات آموزش بدهیم، در ابتدا او نمیداند چه کاری درست است. بنابراین باید با یک سیاست و مقادیر اولیه ساده شروع کنیم.
مثال : در ابتدا، ربات چیزی از محیط نمیداند. بنابراین باید سیاست اولیه و تابع ارزش آن را مقداردهی کنیم. فرض کنید برای شروع، ربات هیچ تجربهای ندارد و همه احتمالات و ارزشها را برابر در نظر میگیرد. بهعنوان مثال، اگر ربات از Q-Learning استفاده کند، مقدار اولیه Q-values (ارزش اقدامات مختلف در حالات مختلف) برابر با صفر است.
4.آموزش عامل (Training the Agent)
ربات با حرکت در محیط، تجربه کسب میکند. بهعنوان مثال، اگر به سمت دیوار برود، یاد میگیرد که این حرکت اشتباه است و اگر به سمت سکه برود، متوجه میشود که این کار درست است. با تمرین بیشتر، ربات بهتر و بهتر میشود.
اکتشاف و بهرهبرداری: ربات باید گاهی اوقات حرکات جدیدی را امتحان کند (اکتشاف) تا راههای جدیدی برای پیدا کردن سکهها بیابد. اما وقتی مطمئن شد که یک راه خوب است، از آن راه استفاده میکند (بهرهبرداری).
مثال : ربات در محیط شروع به حرکت میکند. در هر لحظه یک اقدام انجام میدهد (مثلاً به سمت راست میرود). سپس میبیند چه اتفاقی میافتد (آیا سکه پیدا کرده یا با مانع برخورد کرده است). بر اساس این تجربه، پاداش یا جریمه دریافت میکند و از این اطلاعات برای بهروزرسانی سیاست و تابع ارزش خود استفاده میکند. به تدریج، ربات یاد میگیرد که کدام حرکتها بهتر است.
5.عملکرد عامل را ارزیابی کنید (Evaluate the Agent)
بعد از اینکه به ربات آموزش دادیم، باید ببینیم چقدر خوب یاد گرفته است. با مشاهده عملکردش در محیط میتوانیم ارزیابی کنیم که آیا تصمیماتش خوب هستند یا خیر.
بازبینی بصری: میتوانیم بازی ربات را مشاهده کنیم تا ببینیم که آیا واقعاً یاد گرفته است یا خیر. بهعنوان مثال، میتوانیم بررسی کنیم که آیا هنوز با موانع برخورد میکند یا بهسرعت به سمت سکهها میرود.
مثال : بعد از اینکه ربات برای مدتی آموزش دید، باید ببینیم که چقدر خوب یاد گرفته است. بهعنوان مثال، ربات را در چندین مرحله از بازی قرار میدهیم و بررسی میکنیم که آیا میتواند بیشترین سکهها را جمعآوری کند یا خیر. معیار پاداش تجمعی (مجموع پاداشهایی که ربات دریافت کرده است) نشان میدهد که چقدر خوب کار کرده است.
6.تنظیم فراپارامترها (Hyperparameter Tuning)
مانند این است که به ربات بگوییم با چه سرعتی یاد بگیرد. اگر خیلی سریع یا خیلی کند یاد بگیرد، ممکن است عملکردش به درستی پیش نرود. بنابراین، باید پارامترهای آموزشی را بهدقت تنظیم کنیم.
فراپارامترها شامل نرخ یادگیری (چقدر سریع یاد بگیرد) ، ضریب تخفیف (چقدر به پاداشهای آینده اهمیت دهد) و نرخ اکتشاف هستند.
بهعنوان مثال، اگر نرخ یادگیری خیلی بالا باشد، ممکن است ربات حرکات اشتباه را سریع یاد بگیرد و کارهای بدتری انجام دهد. بنابراین، باید با تنظیمات مختلف این پارامترها، عملکرد ربات را بهینه کنیم.
7.پیادهسازی عامل (Deploying the Agent)
حالا که ربات خوب یاد گرفته است، او را در دنیای واقعی یا یک محیط واقعی قرار میدهیم تا کارش را انجام دهد. اگر محیط تغییر کند، ربات باید همچنان یاد بگیرد و خود را تطبیق دهد.
مثال : وقتی مطمئن شدیم که ربات بهخوبی یاد گرفته است، او را در محیط واقعی قرار میدهیم. بهعنوان مثال، میتوانیم او را در یک بازی واقعی یا در یک ربات واقعی که در یک کارخانه کار میکند، قرار دهیم. همچنین باید مراقب باشیم که اگر محیط تغییر کرد، ربات بتواند با آن سازگار شود و به یادگیری ادامه دهد.
ترتیبی که هوشینو برای خواندن مطالب یادگیری تقویتی به شما پیشنهاد میکند:
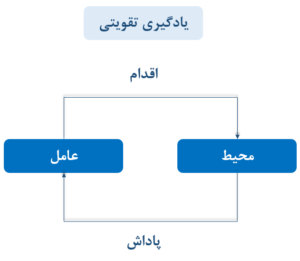
به یادگیری نحوه تعامل یک وضعیت به یک اقدام به طوری که یک سیگنال پاداش عددی را به حداکثر نماید ، یادگیری تقویتی میگویند .
یادگیری تقویتی نوعی یادگیری ماشین است که در آن یک مدل یاد میگیرد چگونه در یک محیط خاص عمل کند. این مدل تصمیمهایی میگیرد و نتایج هر تصمیم را دریافت میکند. اگر تصمیم درست باشد، پاداش مثبت و اگر اشتباه باشد، پاداش منفی دریافت میکند. بر خلاف یادگیری بانظارت (Supervised Learning) این مدلها به طور مستقل یاد میگیرند و نیازی به برچسبگذاری ندارند .
یادگیری تقویتی در موقعیتهایی که باید تصمیمات متوالی گرفته و یا هدفهای بلندمدت داشته باشد، بسیار خوب عمل میکند. مثالهایی از این کاربردها شامل بازی شطرنج و رباتیک است.
هدف اصلی در یادگیری تقویتی، حداکثر کردن دقت و کارایی است تا بیشترین پاداشهای مثبت را مدل دریافت نماید.
تصویر1- عملکرد یادگیری تقویتی
این روش مشابه فرآیند یادگیری آزمایش و خطا است که انسانها برای رسیدن به اهداف خود استفاده میکنند . اقداماتی که به سمت هدف شما پیش میروند تقویت میشوند، در حالی که اقداماتی که از هدف منحرف میشوند نادیده گرفته میشوند.
دلایل اصلی استفاده از یادگیری تقویتی عبارتند از:
1. یادگیری از تعاملات
الگوریتم یادگیریتقویتی یک الگوریتم تعاملی است .
تعامل در یادگیری تقویتی به معنای ارتباط بین عامل (Agent) و محیط (Environment) است.
تعامل در یادگیری تقویتی به عامل کمک میکند تا از تجربیاتش یاد بگیرد و به تدریج بهترین راهها را برای رسیدن به هدفش پیدا کند.این فرآیند به شدت شبیه به یادگیری انسانی است، جایی که ما از تجربههای خود یاد میگیریم و برای بهبود تلاش میکنیم.
2. تصمیمگیری قابل تنظیم
تصمیمگیری در یادگیری تقویتی به این معناست که عامل میتواند بر اساس تغییرات محیط خود عمل کند.
مثلاً فرض کنید یک ربات در یک اتاق پر از مانع است. اگر یکی از موانع جابهجا شود، ربات باید بتواند تصمیم بگیرد که چگونه به سمت هدفش برود. این یعنی ربات باید به سرعت به شرایط جدید پاسخ دهد و تصمیمات خود را بر اساس آن تغییر دهد.
به عبارت سادهتر، عامل نمیتواند فقط یک بار یاد بگیرد و تمام؛ بلکه باید همیشه آماده باشد تا با تغییرات محیطی سازگار شود و بهترین تصمیم را بگیرد.
3. یادگیری مداوم
به این معنی است که عامل همیشه در حال یادگیری میباشد و از بازخوردهایی که دریافت میکند، برای تصمیمات خود استفاده میکند.
این بازخوردها ممکن است دیر به او برسند یا خیلی کم باشند.
برای مثال، اگر ربات یک اقدام اشتباه انجام دهد و بعداً متوجه شود که آن اقدام باعث تنبیه شده است، این بازخورد ممکن است کمی زمان ببرد تا به او برسد. اما ربات یاد میگیرد که در آینده آن کار را انجام ندهد.
بنابراین، حتی اگر بازخوردها کم و دیر دریافت شود ، ربات به تدریج بهبود مییابد و تصمیمات بهتری خواهد گرفت .
دو مشخصه مهم در یادگیری تقویتی
دو مشخصه جستجو با آزمون و خطا و پاداشهای تاخیردار دو ویژگی بسیار مهم در یادگیریتقویتی هستند .
به عنوان مثال، فرض کنید یک ربات در حال یادگیری نحوه حرکت در یک اتاق است. وقتی ربات به هدفش (مثلاً رسیدن به یک توپ) نزدیک میشود، یک پاداش (مثل یک علامت مثبت یا یک امتیاز) دریافت میکند. اما اگر به دیوار برخورد کند، تنبیه (مثل یک علامت منفی) خواهد شد .
ربات از هر اقدام خود یاد میگیرد. اگر ببیند که مسیر خاصی به پاداش منجر میشود، دفعه بعد آن مسیر را بیشتر انتخاب میکند. همچنین، این الگوریتمها میتوانند برای پاداشها صبر کنند؛ مثلاً ممکن است ربات مجبور شود چندین اقدام انجام دهد تا در نهایت به هدف برسد و پاداش را دریافت کند، اما آن را به خاطر میسپارد تا در آینده تصمیمات بهتری بگیرد. در نتیجه، به تدریج ربات بهترین مسیرها را برای رسیدن به اهداف یاد میگیرد.
اجزای کلیدی یک سیستم یادگیری تقویتی عبارتند از :
1.عامل (Agent) : موجودیتی که محیط خود را درک کرده ، تصمیم گیری میکند و با آن تعامل دارد .
2.محیط (Environment) :
تعاریف مختلف
هر چیزی که عامل برای رسیدن به هدف خود با آن تعامل میکند .
محیط فضایی است که عامل در آن فعالیت میکند و شامل تمام عواملی است که بر روی تصمیمات و عملکرد عامل تأثیر میگذارد. این محیط میتواند شامل سایر عوامل، شرایط و وضعیتها باشد و عامل با انجام اقداماتی در آن، بازخوردهایی مانند پاداش یا جریمه دریافت میکند تا یاد بگیرد چگونه بهتر عمل کند .
3.وضعیت (State) :
تعاریف مختلف
وضعیت فعلی محیط که توسط عامل درک میشود .
وضعیت در یادگیری تقویتی به معنای نمایی از شرایط کنونی محیط است که عامل بر اساس آن تصمیمگیری میکند. این وضعیت شامل اطلاعاتی است که به عامل کمک میکند تا بفهمد چه اقدامی باید انجام دهد. به عبارت دیگر، وضعیت نشاندهنده ویژگیها و شرایط محیط در لحظهای خاص است و عامل با استفاده از آن، بهترین تصمیم را برای رسیدن به هدفش اتخاذ میکند.
4.اقدام (Action) :
تعاریف مختلف
تصمیمات یا حرکت هایی که عامل می تواند بگیرد .
هر تصمیمی که یک عامل درمورد نحوه تعامل با محیط خود میگیرد .
اقدام در یادگیری تقویتی به معنای عملی است که عامل در یک وضعیت خاص انجام میدهد تا بر روی محیط تأثیر بگذارد. این اقدام میتواند شامل انتخاب یک عمل خاص، تغییر وضعیت محیط یا برقراری تعامل با دیگر عوامل باشد. هدف از انجام اقدام، به حداکثر رساندن پاداش دریافتی یا بهبود عملکرد در آینده است. به عبارت دیگر، اقدامها راههایی هستند که عامل میتواند از آنها برای دستیابی به هدفهایش استفاده کند و بر اساس بازخوردی که از محیط دریافت میکند، تصمیم میگیرد که در وضعیتهای آینده چه اقداماتی را انجام دهد.
5.پاداش (Reward) :
تعاریف مختلف
بازخورد محیط در پاسخ به اقدام عامل ، نشان دهنده موفقیت یا شکست عمل است.
بازخوردی که پس از هر اقدام از محیط به عامل باز می گردد. این به عامل کمک می کند تا خود را ارزیابی کند.
پاداش در یادگیری تقویتی به معنای بازخوردی است که عامل پس از انجام یک اقدام در یک وضعیت خاص از محیط دریافت میکند. این بازخورد میتواند مثبت (پاداش) یا منفی (جریمه) باشد و به عامل کمک میکند تا بفهمد چقدر اقدامش موفقیتآمیز بوده است. هدف از پاداش، هدایت یادگیری عامل است؛ یعنی هرچه پاداش بیشتر باشد، احتمال تکرار آن اقدام در آینده افزایش مییابد. به عبارت دیگر، پاداشها ابزاری هستند که عامل را به سمت یادگیری و بهبود استراتژیهای تصمیمگیری سوق میدهند.
6.سیاست (Policy) :
تعاریف مختلف
استراتژی که عامل برای تعیین اقدامات خود بر اساس وضعیت فعلی استفاده می کند.
تکنیکی که یک عامل برای تصمیم گیری در مورد اقدام بعدی استفاده می کند.
سیاست در یادگیری تقویتی به معنای یک استراتژی است که عامل برای انتخاب اقداماتش در پاسخ به وضعیتهای مختلف استفاده میکند. این سیاست میتواند به صورت یک تابع باشد که برای هر وضعیت، اقدام مناسب را تعیین میکند.
هدف سیاست این است که به عامل کمک کند تا با توجه به وضعیتهای مختلف، بهترین اقدام را انتخاب کند تا در نهایت پاداشهای بیشتری را کسب کند و به هدفهایش برسد. به طور کلی، سیاست نقش کلیدی در یادگیری و تصمیمگیری مؤثر عامل دارد.
7.تابع ارزش (Value Function):
تعاریف مختلف
یک تابع که پاداشهای آینده مورد انتظار را که میتوان از هر وضعیت به دست آورد، تخمین میزند.
تابع ارزش در یادگیری تقویتی به معنای یک تابع ریاضی است که برای هر وضعیت، مقدار ارزش آن وضعیت را تخمین میزند. این ارزش نشاندهنده پیشبینی مجموع پاداشهایی است که عامل میتواند در آینده از آن وضعیت خاص به دست آورد، با توجه به سیاستی که در حال حاضر دنبال میکند.
هدف تابع ارزش این است که به عامل کمک کند تا تصمیمات بهتری بگیرد و اقداماتی را انتخاب کند که منجر به بیشترین پاداش ممکن شود. به عبارت دیگر، تابع ارزش ابزاری است که به عامل کمک میکند تا ارزش وضعیتها و اقداماتی که میتواند انجام دهد را درک کند.
8.تابع Q (Q-Value(Action-Value)Function) :
تابعی که پاداش های مورد انتظار آینده را برای انجام یک اقدام خاص در یک وضعیت مشخص تخمین می زند.
تصویر2- یادگیری تقویتی در یادگیری ماشین
مثال عملیاتی از موارد بالا
بازی مار و پله ، در این بازی، هدف بازیکن این است که با انجام حرکات مناسب از خانهی شروع (خانهی ۱) به خانهی پایان (خانهی ۱۰۰) برسد. بازیکن باید تلاش کند از مارها دوری کرده و با استفاده از نردبانها سریعتر به هدف برسد.
1.عامل (Agent)
عامل همان بازیکن است که در این بازی قصد دارد به خانهی ۱۰۰ برسد. عامل تصمیم میگیرد چه اقدامی انجام دهد (برای مثال، حرکت به جلو در خانهها).
2.محیط (Environment)
محیط، همان صفحهی بازی مار و پله است که شامل خانهها، مارها و نردبانها میباشد. عامل با این محیط تعامل دارد و اقداماتش را بر اساس وضعیت فعلی محیط انجام میدهد.
3.وضعیت (State)
هر خانهای که بازیکن در آن قرار دارد، یک وضعیت محسوب میشود. به عنوان مثال، اگر بازیکن در خانهی ۲۵ باشد، وضعیت فعلی او (خانهی ۲۵) است. وضعیتها میتوانند اطلاعات بیشتری را نیز شامل شوند؛ مثلاً اینکه آیا بازیکن در نزدیکی یک مار یا نردبان قرار دارد.
4.اقدام (Action)
اقدامها همان تصمیماتی هستند که عامل میگیرد. در این بازی، اقدامها شامل پرتاب تاس است که مقدار حرکت را تعیین میکند. برای مثال، اگر عامل تاس را بیندازد و عدد ۴ بیاید، به اندازهی ۴ خانه به جلو حرکت میکند.
5.پاداش (Reward)
پاداش مقدار ارزشی است که عامل پس از انجام یک اقدام دریافت میکند. در این مثال، اگر عامل روی خانهای بیفتد که او را به سمت نردبان بالا ببرد، پاداش مثبت میگیرد (مثلاً مثبت۱۰). اما اگر بر روی مار بیفتد و به خانههای پایینتر برگردد، پاداش منفی دریافت میکند (مثلاً منفی۱۰).
6.سیاست (Policy)
سیاست، همان استراتژی یا قوانینی است که عامل برای تصمیمگیری استفاده میکند. سیاست تعیین میکند که در هر وضعیت، عامل چه اقدامی انجام دهد. به عنوان مثال، سیاست ممکن است به این صورت باشد که اگر عامل به نزدیکی یک نردبان رسید، تلاش کند بر روی آن قرار گیرد.
7.تابع ارزش (Value Function)
تابع ارزش به عامل کمک میکند تا بفهمد هر وضعیت چقدر خوب است. به عبارت دیگر، هر چه یک وضعیت به هدف نزدیکتر باشد، ارزش بیشتری خواهد داشت. برای مثال، خانهی ۹۸ ارزش بیشتری نسبت به خانهی ۵۰ دارد، زیرا به خانهی ۱۰۰ نزدیکتر است.
8.تابع Q (Q-Function)
تابع Q شبیه به تابع ارزش است، اما به ترکیب وضعیت و اقدام توجه میکند. به عبارت دیگر، تابع Q به عامل میگوید که اگر در وضعیت فعلی یک اقدام خاص انجام دهد، چقدر احتمال دارد که به پاداش برسد. برای مثال، اگر عامل در خانهی ۱۰ باشد و تاس بیندازد، تابع Q تخمین میزند که آیا این اقدام به اندازهی کافی خوب است تا به خانههای بهتری برسد.
1. فرآیند تصمیمگیری مارکوف (Markov Decision Process (MDP))
فرآیند تصمیمگیری مارکوف یک چارچوب ریاضی است که برای توصیف محیط در یادگیری تقویتی استفاده میشود. این چارچوب شامل مجموعهای از وضعیتها، اقدامها، احتمالات انتقال و پاداشهاست. فرآیند تصمیمگیری مارکوف فرض میکند که خاصیت مارکوف برقرار است ، به این معنی که وضعیت آینده تنها به وضعیت و اقدام کنونی بستگی دارد و به دنبالهای از رویدادهایی که قبل از آن اتفاق افتادهاند وابسته نیست.
2.اکتشاف (Exploration) و بهرهبرداری (Exploitation)
Exploration: به عاملی اشاره دارد که اقدامات جدیدی را برای کشف و جمعآوری اطلاعات بیشتر در مورد محیط انجام میدهد.
اکتشاف به معنی آزمایش گزینههای مختلف است. برای مثال ، فرض کنید یک ربات در حال یادگیری نحوه پیدا کردن غذا در یک اتاق است. در مرحله اکتشاف، ربات ممکن است به نقاط مختلف اتاق برود و مسیرهای متفاوتی را امتحان کند تا ببیند کدام یک به غذا میرسد.
Exploitation: به عامل اشاره دارد که اقداماتی را انتخاب می کند که می داند بر اساس دانش فعلی خود بالاترین پاداش را به همراه خواهد داشت.
بهرهبرداری به معنای استفاده از تجربیات قبلی برای گرفتن بهترین تصمیمات است. وقتی ربات مسیری را پیدا کند که به غذا میرسد ، در مرحلهی بهرهبرداری از همان مسیر استفاده میکند تا سریعتر و با اطمینان بیشتر به هدفش برسد.
به عبارت دیگر، ابتدا ربات چیزهای جدید را امتحان میکند (اکتشاف) و سپس از اطلاعاتی که به دست آورده برای تصمیمگیری بهتر در آینده استفاده میکند (بهرهبرداری). این دو مرحله به ربات کمک میکند تا در نهایت بهترین راه را برای رسیدن به هدفش یاد بگیرد.
یکی از مهمترین چالشهایی که به طور خاص در یادگیری تقویتی وجود دارد و سایر روشهای یادگیری با آن روبرو نیستند، نیاز به ایجاد تعادل بین اکتشاف و بهرهبرداری از تجربیات قبلی است.
چرا تعادل مهم است ؟
تصویر4- Exploration , Exploitation
اگر فقط اکتشاف کنید و هرگز از اطلاعات قبلی استفاده نکنید، ممکن است زمان و منابع زیادی را صرف کنید و به نتایج ضعیفی دست یابید. از طرف دیگر، اگر تنها به استفاده از اطلاعات موجود بپردازید و هیچگاه چیزهای جدید را امتحان نکنید، ممکن است از گزینههای بهتر بیخبر بمانید و نتوانید پاداشهای بیشتری کسب کنید. بنابراین، تعادل میان اکتشاف و بهرهبرداری برای دستیابی به بهترین نتایج ضروری است .
کدام یک دید بیشتری به آینده دارد ؟
در یادگیری تقویتی، Exploitation بیشتر بر اساس تجربههای قبلی و پاداشهای به دست آمده است، یعنی این رویکرد به نوعی گذشتهنگر است. الگوریتم در این حالت از تصمیمهایی استفاده میکند که قبلاً پاداشهای خوبی به همراه داشتهاند. اما Exploration به آینده نگاه میکند؛ یعنی الگوریتم به جای تکیه بر تجربیات قبلی، به دنبال این است که اطلاعات بیشتری از محیط جمع کند تا در آینده تصمیمات بهتری بگیرد.
بنابراین، Exploration دید بیشتری به آینده دارد، زیرا به دنبال کشف احتمالات جدید و شاید بهتر است که ممکن است در آینده سودمند باشند.
3.سیگنال پاداش (Reward Signal)
سیگنال پاداش، بازخوردی است که عامل پس از انجام یک اقدام از محیط دریافت میکند. هدف عامل این است که پاداشهایی را که در طول زمان دریافت میکند به حداکثر برساند، و این امر فرآیند یادگیری او را هدایت میکند.
4.سیاست (Policy)
یک سیاست رفتار عامل را با تبدیل وضعیتها به اقدامات تعریف میکند. دو نوع سیاست وجود دارد:
سیاست قطعی: هر وضعیت را به یک اقدام خاص متصل میکند.
این نوع سیاست به هر وضعیت یک اقدام خاص را اختصاص میدهد. به عبارت دیگر، وقتی عامل در یک وضعیت خاص قرار دارد،همیشه یک اقدام مشخص را انتخاب میکند.
مثال: فرض کنید یک ربات در حال حرکت در یک اتاق است. اگر ربات در نزدیکی درب خروج قرار گیرد، طبق سیاست قطعی، همیشه از درب خارج میشود. بنابراین، در وضعیت «نزدیک درب خروج»، اقدام او «خروج از درب» است. این بدان معناست که او هیچ گزینه دیگری را در نظر نمیگیرد و همواره همین کار را انجام میدهد.
سیاست تصادفی: هر وضعیت را به یک توزیع احتمال بر روی اقدامات متصل میکند.
در این نوع سیاست، به هر وضعیت یک توزیع احتمال برای انتخاب اقدامات اختصاص داده میشود. به این معنا که عامل در هر وضعیت، با احتمالهای مختلف ممکن است اقدامهای متفاوتی را انتخاب کند.
مثال: فرض کنید یک ربات در یک اتاق با سه مسیر مختلف برای حرکت قرار دارد: راست، چپ و جلو. اگر ربات در وضعیت «نزدیک درب» قرار گیرد، ممکن است با ۵۰٪ احتمال به راست برود، با ۳۰٪ احتمال به چپ برود و با ۲۰٪ احتمال به جلو برود. در اینجا، هیچ تصمیم مشخصی وجود ندارد و انتخاب مسیر به صورت تصادفی و بر اساس این احتمالها انجام میشود.
5.تابع ارزش (Value Function)
تابع ارزش، پاداش تجمعی مورد انتظار را برای هر وضعیت تخمین میزند و نشان میدهد که یک وضعیت از نظر پاداشهای آینده چقدر ارزشمند است. این تابع به عامل کمک میکند تا اقداماتی را انتخاب کند که منجر به وضعیتهایی با پاداشهای مورد انتظار بالاتر شود.
6.تابع Q (Q-Function (Action-Value Function))
تابع Q، یا تابع ارزش اقدام، پاداش تجمعی مورد انتظار را برای انجام یک اقدام خاص در یک وضعیت مشخص و پیروی از سیاست بهینه تخمین میزند. این مفهوم در بسیاری از الگوریتمهای یادگیری تقویتی اهمیت زیادی دارد و به عامل کمک میکند تا تصمیمات بهتری را بر اساس ارزش اقدامات مختلف بگیرد.
تابع ارزش به دو نوع اصلی تقسیم میشود :
تابع ارزش وضعیت (V(s) یا Value Function) : این تابع ارزش هر وضعیت را بر اساس پاداشهایی که میتوان از آن وضعیت به دست آورد تخمین میزند.
تابع ارزش عمل (Q(s,a) یا Q-Function (Action-Value Function)) : این تابع ارزش یک عمل خاص در یک وضعیت خاص را محاسبه میکند و نشان میدهد که انجام آن عمل در آن وضعیت چه مقدار پاداش به ارمغان میآورد.
ترتیبی که هوشینو برای خواندن مطالب یادگیری تقویتی به شما پیشنهاد میکند: